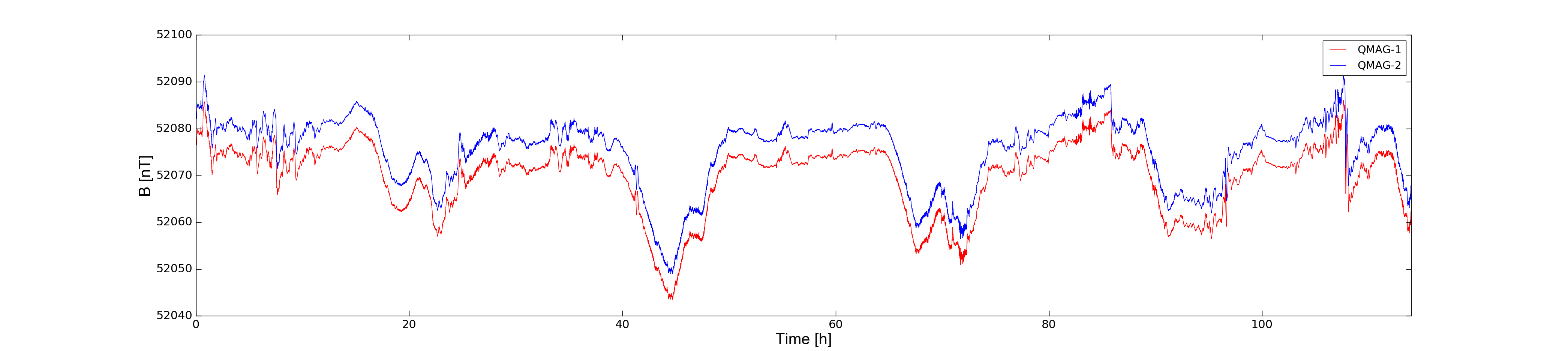
An ideal sensor is stable and exhibits very low drift between the measured value and the actual value, a task often difficult to achieve at low frequencies over long measurement times. Our QTFM attains high, low-frequency stability and high sensitivity by implementing low-noise/low-drift electronics, and by stabilizing to a high degree every operating parameter of the magnetometer. We recently placed two of our QTFM sensors in a somewhat remote location and ran them for nearly five days. The data collected is shown below and displays expected diurnal variations of nearly 50nT over the measurement time.
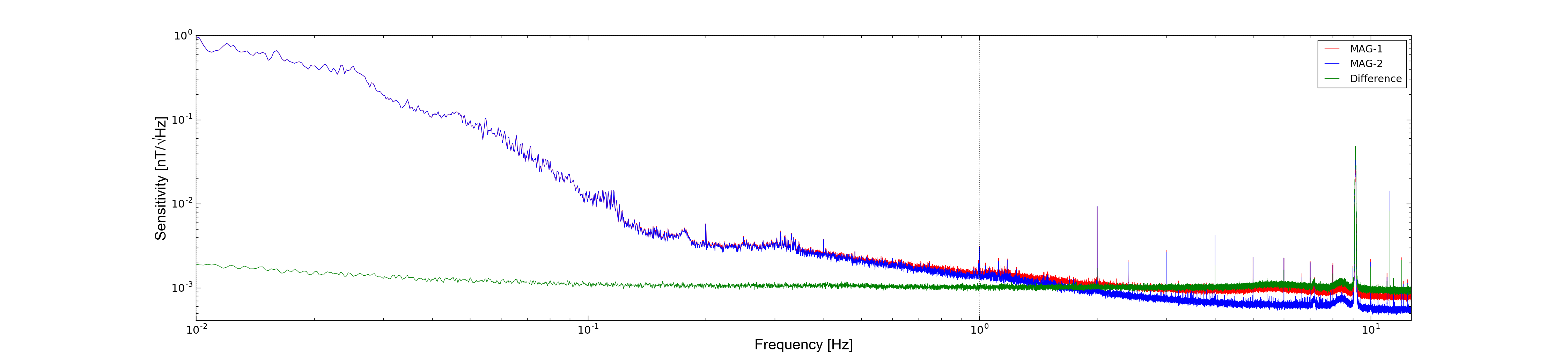
Subtracting the signals and taking the fast Fourier transform (FFT), we get the combined noise of both sensors shown in the green line of in the plot below. Notable is sub-picoTesla sensitivity of the individual sensors and the flatness of residual noise spectrum even to very low frequencies.